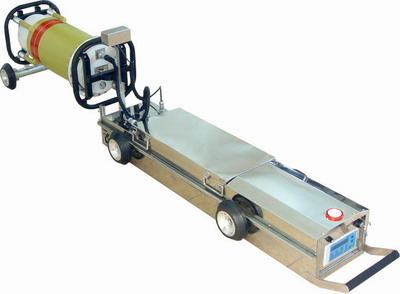
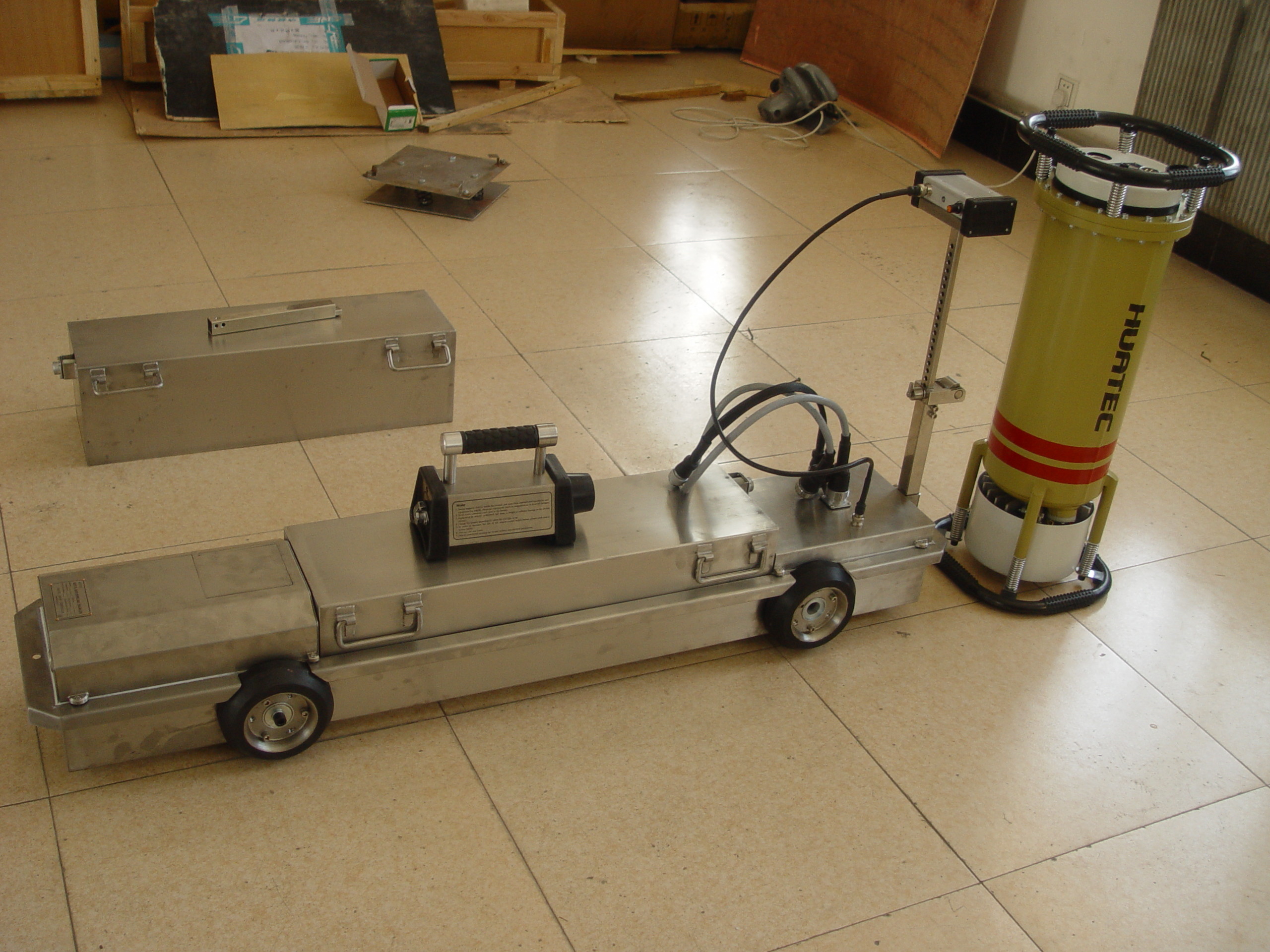
Kontrolowane przez PLC X - Ray Pipeline Crawlers 250Kv 17Ah Ndtpipeline Crawler X-Ray Machine
Podstawowa zasada ciągnika rurociągowego rentgenowskiego obejmuje głównie mechaniczną część kroczącą, część generującą promienie, czujnik pozycjonujący, sterownik logiczny, zdalne zasilanie i źródło poleceń oraz pozycjonowanie poza rurociągiem.Jest to automatyczne urządzenie generujące promienie.Mechaniczna część krocząca napędza urządzenie generujące promieniowanie, które porusza się w rurociągu, a specjalna folia rentgenowska i etykieta są naklejane na spoinę czołową rury.Należy pamiętać, że dzięki współpracy urządzenia zdalnego sterowania na zewnątrz rurociągu można przeprowadzić pozycjonowanie i odsłonięcie w rurociągu, tak aby przeprowadzić transmisję rentgenowską spoiny czołowej rurociągu i zrealizować nieniszczącą detekcję rurociągu spoina czołowa.Ponadto za pomocą pilota można również sterować ruchem do przodu, do tyłu, odpoczynkiem i innymi czynnościami ciągnika.Kontrola pyłu.
System gąsienicowy rurociągu składa się z mechanizmu kroczącego, urządzenia do kontroli wizualnej do obserwacji i wykrywania wewnętrznej ściany rury, urządzenia sterującego i komunikacyjnego itp., a w razie potrzeby można dodać urządzenie do naprawy wad w rurze.W zależności od różnych zastosowań robota można zastosować do rur o średnicy 80 mm-120 mm, 120 mm-200 mm lub większej;Minimalny rozmiar wykrycia defektu rurki to 0,5×0,5mm.Robot wykorzystuje układ napędowy z silnikiem prądu stałego, siła napędowa jest ogromna.Potrafi skutecznie rozwiązywać problemy związane z rurociągami.
Konstrukcja sprzętowa ciągnika rurociągowego rentgenowskiego obejmuje: mechaniczną część kroczącą, część generującą promieniowanie, czujnik pozycjonowania, część sterownika (obwodu), część zasilacza i automatyczną część pogotowia ratunkowego.Część mechaniczna: składa się z korpusu elektrycznego, korpusu zasilania, silnika 24 V DC, reduktora, gumowego koła, osi i akcesoriów łączących.Cała maszyna jest połączona za pomocą gąsienicowego rurociągu rentgenowskiego.Ładowanie samochodu zasilającego: wybierz płytę ze stali nierdzewnej o grubości 1 mm, tłoczenie i spawanie.Wymagana jest pewna sztywność i nie jest łatwa do odkształcenia.Zamontuj koła z materiału odpornego na zużycie.Całkowita długość zależy od pojemności baterii.Unikaj zwiększania promienia skrętu, zwiększaj trudność transportu, czas nie będzie zbyt długi.Zobacz metodę okablowania baterii.Schemat ideowy okablowania baterii do aparatu rentgenowskiego (schemat ideowy) cz.: Zaproponowane przez nas wymagania projektowe i interfejsowe zostały przekazane wyspecjalizowanemu producentowi aparatu rentgenowskiego.Specyficzne wymagania to: zasilanie prądem stałym o wysokim napięciu DC, stałe napięcie lampy 160kV, prąd lampy 3mA, anulowanie części AC/DC, zmiana parametrów pakietu wysokiego napięcia, dostarczenie sygnału zwrotnego o błędzie, automatyczne otwarcie wentylatora rozpraszania ciepła, automatyczne opóźnienie wyłączenia zgodnie z wymaganiami , aby oszczędzać energię.Konsola powinna być niewielka i zintegrowana z głowicą X.Konstrukcja przyjmuje pyłoszczelną konstrukcję.Część czujnika lokalizacji: ten problem został zasadniczo rozwiązany w maszynie do śledzenia promieni gamma, opracowanej z powodzeniem w 1997 roku. W celu zmniejszenia złożoności projektu, jitter i błędy można rozwiązać w programowaniu odpornym na błędy.Ze względu na duże wibracje w procesie transportu, proces produkcyjny musi być wyższy, części są ściśle ekranowane i podejmowane są środki antywibracyjne.
Przeszukiwacze rurociągów rentgenowskich zawierają specjalną część, która może wykryć linię spawania długiego rurociągu.Rurociągi RTG mają zalety wysokiej jakości radiograficznej, wysokiej czułości obrazowania, niskiej awaryjności i wysokiej wydajności pracy.Rurociągowe gąsienice rentgenowskie są wyposażone w dyferencyjne amortyzatory napędowe i wibracyjne.Podwozie gąsienicowych robotów rentgenowskich do rurociągu może być przesuwane w rurociągu w sposób ciągły, bez nierównego ruchu i przewracania się.Rurociągowe gąsienice rentgenowskie mogą być przemieszczane w rurociągu z dużą wydajnością, ponieważ jest sterowane przez PLC, chroniąc je przed zablokowaniem i pod napięciem.Przeszukiwacz rurociągu rentgenowskiego można łatwo podzielić na kilka części, a następnie złożyć, dzięki czemu jest łatwy do przenoszenia.Możesz zmienić parametr ekspozycji i sprawić, by robot prześwietlający rurociąg rentgenowski poruszał się, zatrzymywał i miał ekspozycję za pomocą zewnętrznego źródła sterującego.Przeszukiwacze rurociągów rentgenowskich są łatwe w obsłudze.
Specyfikacja robota X Ray Pipeline Crawler
|
Model
Specyfikacja
|
HXPC-100A
|
HXPC-100B
|
HXPC-100C
|
|
Zakres wykrywania średnicy rury
|
Φ800—Φ1500mm
|
Φ500—Φ1000mm
|
Φ273—Φ700mm
|
|
Waga całkowita
|
140 kg
|
125 kg
|
100 kg
|
|
Długość gąsienicy
|
2200mm
|
2000mm
|
2000mm
|
|
Pełzająca prędkość
|
15M/min
|
15M/min
|
15M/min
|
|
Odległość pełzania
|
2KM
|
2KM
|
2KM
|
|
Błąd lokalizacji
|
±5mm
|
±5mm
|
±5mm
|
|
Maksymalne napięcie wyjściowe
|
300Kv
|
250Kv
|
200Kv
|
|
Maksymalny prąd wyjściowy
|
3mA
|
3mA
|
3mA
|
|
Umiejętność wspinaczki
|
40°
|
40°
|
25°
|
|
Kąt promieniowania
|
360 ° * 35 °
|
360 ° * 35 °
|
360 ° * 35 °
|
|
Moc wyjściowa
|
1,5 kW
|
1,25 kW
|
1KW
|
|
Energia baterii
|
22Ah/120V
|
17Ah/120V
|
12Ah/120V
|
|
Moc silnika
|
300W
|
300W
|
200W
|
|
Czas ekspozycji
|
1s ~ 1h kontynuuje regulację
|
1 s ~ 1 godzina w dalszym ciągu regulowana
|
1 s ~ 1 godzina w dalszym ciągu regulowana
|
|
Napięcie ekspozycji
|
5 wybór
|
5 wybór
|
5 wybór
|
|
Operacja Temperatura
|
-30°~70°
|
-30°~70°
|
-30°~70°
|
Robot gąsienicowy zawiera poniższe części jako standardowe akcesoria:
Główny pojazd
Stos kwasowo-ołowiowy: 110 V (22 Ah)
Aparat rentgenowski: 250KV/5mA
Pilot zdalnego sterowania (typ indukcji elektromagnetycznej, bez źródła)


 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!